The Role of Communication in Systems
Introduction
Before the rise and dominance of the wireless communication between devices, presumably, sharing of information and data was solely reserved to animals until scientific advancement grounded on experiments and observation informing the communication between electronics. Over the centuries, communication have been perceived as an integral attribute performance of core and basic tasks such as in engagement, organizing, and controlling whether it is in perspective of a an organizational or living thing. As pointed by (Hilbert, and López, 2011; Wenger, 2014), for a system to successful undertake intended tasks, it must structure its components and attribute to share information effectively whether from the top giving instructions on ways of implementing its strategies or subordinate feedback on implementation progress, success rate, or challenges experienced. In living things point of view, animals respond to stimuli received from various sensory organs on what happening on its immediate environment where, with this information, the brain reacts appropriately to counter or adopted (Rutishauser et al., 2013; Lewis, 2013). Significantly, communication between two entities whether in organizational perspective, animal’s organs, social elements, or devices driven by exchange of ideas, message, or information through writing, spoken language, or signals has been regarded as a critical in functionality and existences of social elements, natural components, organizational units, and, presently, electronic devices.
Over the past decade, communication driven by electronic devices, electrical signals, radio signals, and computer (binary digits) such as mobile, web (email), Short Messages Services (SMS) and internet of things (IoT) communication has seen a drastic growth (Seel, 2012; Pahlavan, and Krishnamurthy, 2011). As an umbrella to all the sharing of information by electronic transmission of impulses such as television, radio, cable, and telegraph, telecommunication embodies digital (transfer of bitstream or a digitalized analogue signal), wired, and wireless transmission (Bluetooth and Wi-Fi). As described by Viterbi et al. (2010) and Lee & Messerschmitt (2012), digital communication allows transfer of information from one point to another using such channels as optical fibres, copper wires, computer buses, wireless communication. Development of internet of things (IoT) has seen implementation of several communication protocols connecting devices in a networked structure. The most prominent wireless protocol include Wi-Fi, cellular, microwave communication, broadcast radio, and Bluetooth where they support transmission of data and information wirelessly without the need for a cable, optical, wire, or electronics conductors. The expectation on the growth and influence of wireless interconnection via Bluetooth technology between devices indicate drastic growth to more than 30 billion devices by 2022 (Reuters, 2018). According to some proponents, the connectivity will become a standard feature.
Over the past decade the focus of has been on interconnecting devices sharing data and information for instance, car sending a message to other users in an network on the situation or attributes linked to the road usage such as traffic. According to Bello and Zeadally (2016), the argument in development of connectedness among different devices has been driven by focus of an effective and reliable protocol. Currently, the idea of the ‘smart cities’ and ‘connected devices’ incorporating connecting of devices such as cars, mobile phones, and electronics through integration of embedded electronic components, sensors, and software has dominated the present technological advancement (Tatsuno, 2019; Malik, 2017). The proponents of ‘smart cities’ and ‘smart cars’ hold the view that by connectivity of components allowing transfer of data from one device to another (car-to-car) impacts human
During the early years of smartphone development, Bluetooth became synonymous with sharing of information over a short distance replacing the need of connecting devices by cables. According to Gomez et al. (2012) and Asadullah & Ullah (2017), the technology has aided in enhancement of wireless communication especially with multiple users such as audio and entertainment that include connection between PCs, tablets, and phones and presently connected device and automotive. As described by Heydon (2013), Bluetooth technology as well as it upgraded Bluetooth low energy (BLE) versions allows transmission and reception of binary data through Bluetooth interface. Therefore, it establishes two-way communication connection with the devices. As elaborated by Buratti et al. (2009), Bluetooth network consists of Personal Area Network (PAN) with capability of connecting maximum of 8 devices and at minimum of two interconnected devices. Inception of smartphones and recently rapid growth of wearable devices has, in the same measure, resulted in increased demand for Bluetooth technology. As pointed out by Hollander (2018), nearly 4 billion Bluetooth device were sold in 2018 embedded in most electronic devices such as smartphones and PCs setting precedence to adoption of the protocol and same features to the beacons, peripherals, and IoT devices. Dong (2015) outlined the influence held by Bluetooth technology on current communication and sharing of information spanning from audio streaming to smart building automation. According to Hollander (2018), it currently plays core role in technical roadmap as well as in the market with annual forecasted growth being 12%.

According to Hollander (2018), 2018 recorded shipment of more than 550 million point-to-point Bluetooth devices supporting data transfer with expectation is that the number will rise to 850 million by 2022. Broadly, the reason behind this aggressive growth is traced to fast, energy-efficiency, and growing need for interconnection of devices. As argued by Pizzi (2017), presently, the focus in both industry environment and technological ecosystem is rooted on advancing the connectedness that allows sharing and transfer of information between the interrelated devices such as a cars or robots in an industrial complex. Arguing from the smart car perspective that is regarded as future of transportation industry, Jia and Ngoduy (2016) deduced that the ability for that cars to communicate sharing such information as route traffic, positioning, travelling speed, braking status, steering-wheel position, and direction to be taken with other cars and potentially other road users will ultimately ease congestion and road accidents. Ideally, information received from other cars allows the cars to build a detailed picture based on the data on the unfolding factors and attributes around them then alerting others. Moreover, integration of the automobile through connectedness that is being able to share information and data supports crash prevention, combined reliable communication, and heightening the safety of the road users as well as enabling rapid assistance to individuals involved in the accidents. As explained by Fourtane (2018), the Smart Mobility Congress held in Barcelona, Spain, the focus was on ways of making the transportation sector more relevant and efficient through connectedness of road users by using sensors, big data, mobile applications, and payment modes. A connected devices, essentially, allows connection of one device (for instance a robot or a car) to other external devices, network, applications, and services. As pointed by Ornes (2016) and Bello & Zeadally (2016), the interconnectivity between this devices applies efficiency in accomplishing tasks, demand for enhancement of safety, remote diagnostics, telematics, parking assistance, to autonomous (self-driving). In contemporary society characterised by numerous technological advancements, which include communication protocols and techniques ranging from wired and wireless communication approaches.

Problems statement
Given the prominence of the Bluetooth communication system, with in excess of 550 million being shipped yearly. It outline to potential of integrating and interconnecting such a wide devices. Developing a system or interconnectivity of these devices optimising the Bluetooth low energy can greatly enhance communication and interaction with several devices wirelessly . Ideally, devices such a car and robots can be set into shared ecosystem where the information and data is transmitted and received to one device (master) to another (slave) allowing remote control. In an industrial scale, many manufacturing process require a physical presence in operating machinery. However, with embedded systems such as a robotic device can be remotely controlled using BLE hence adversely aiding and enhancing interaction and control.
Aims of the research
Continue your journey with our comprehensive guide to Innovative Off-Site Construction for Housing.
Investigating a Bluetooth communication that allows individuals to control a robot car from a smart device and captures the packets being transmitted and received between the smart device and the robot car is the target for the overall project. Furthermore, the information should be displayed on a monitor using software that captures the Bluetooth communication from a laptop that uses Windows 10 operating system. The goal of this report is to mention and critically tackle the connectivity and sharing information from one Bluetooth supported devices to another. This is covered under the ongoing project that analysis and captures the communication between a robot car and smart device that supports Bluetooth low energy module.
Objectives of the study
This study guided by the following objectives
To critically evaluate the literature on electronics device connectivity, interconnectivity of different modules, communication modules, and Bluetooth interconnection module
To investigate the communication between smart device and a robotic car through Bluetooth protocol
To capture on a monitor the information transferred and received between the robot car and smart device
To outline and explain the information and data transmitted and received by smart device and robot car based on interconnectivity of the two devices
Project deliverables
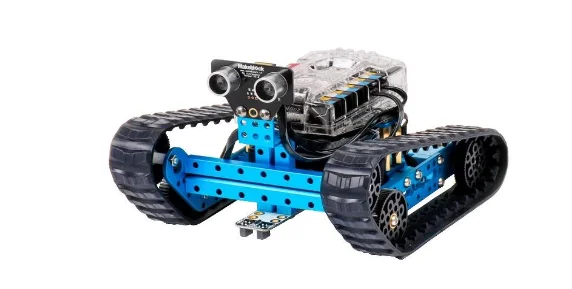
This project focused on producing detailed communication structure while capturing the transmitted and received information on a laptop display. In order to attain the aims, developing interconnectedness between smart device and robot car, the following deliverables played a central factor. First, a robotic car named Land raider (Makeblock), Makeblock Universal Serial Bus (USB) dongle, MakeBlock software, Bluetooth low energy (BLE V1.0), a laptop (computer) running on Windows 10 operating software (OS), serial port monitor, Bluetooth sniffer device, regulator power supply, Wireshark and Makeblock software. Within this project report, most of this deliverables are highlighted accordingly include the schematics of the designed project. This project aimed to show the communication between the two components, hence the screenshot of the shared information showing interconnection and sharing of information is attached in this report.
Risk analysis
Although the project comprised of number of deliverables that consisted of both hardware and software, which had to be bought and configure, the risks involved during entire process was very low. The biggest challenge encountered in addition to purchasing and configuration of the hardware and software, the Wireshark occasionally displayed ‘weird’ information from the Bluetooth that either was corrupted or mismatch between the modules. This was corrected by reconfigure the system each time the displayed information was widely unexpected. Furthermore, the robot car came with 6 batteries each of them has a 1.5V that acted as a source of power for its operation. Initially, rechargeable batteries were brought to acts as source of power but it was found to be very weak to support car operation. The batteries as power source could not support the car for a considerable period therefore, a regulator power supply borrowed from the university was used supporting up to 12V. Notably, for safety purpose avoiding short circuiting of power surge, a power supplied was set to a maximum of 9V.
Report structure
This report of investigation into Bluetooth communication between two devices (robot car and Makeblock Universal Serial Bus (USB), as a smart device) is sub-divided into seven chapters with each consisting of concepts and arguments, which collectively forms the basis of the research. Chapter 1 is an introductory sector covering the background information into current aspect of communication, device connectedness in contemporary world, influence of interconnectivity of different devices, and anticipate growth in the Bluetooth protocol field. Additionally, the first chapter encompasses the problem statement, aim, and objectives driving the research into the exploration of Bluetooth communication. Lastly, it highlights the risks expected and encountered during the investigation as well as deliverables that include the software and hardware (robotic car, USB serial, and laptop) needed to achieve the aims and goals of the research. In the second chapter, it critically analyse the previous studies related to wireless communication, structure supporting communication, Bluetooth communication protocol, development and implication of the Bluetooth communication approach. Moreover, the chapter focuses into identify and highlighting the literature gap that is intended to be bridged by this study. The technical background involved in the implementation of the project as well as the deliverables and the Bluetooth technology core to the project are discussed in the chapter 3. Subsequently, chapter 4 encompasses the methodology employed in addressing the research objectives and aims structurally and systematically. This chapter highlights the approaches employed like the designing and establishing the communication link between the robotic car and the USB Bluetooth device. It outlines in a stepwise manner the procedure deployed in entire research focusing primarily on the implementation process of communication. The fifth chapter captures the implementation process of the project that include its tasks ranging from planning, configuration, and tracking of the communication process. The results and discussion are detailed in the chapter 6. The results acquired following implementation of communication structures showing the transfer and receivership of the sent commands are discussion through critical appraisal of the outcome. Moreover, the chapter outlines the project management and progress followed going back from the planning stages to report writing. The last section, chapter 7, covers the conclusions and suggestions of the future work based on the findings, limitations, and challenges encountered during planning, implementation, and analysis of the findings.
Chapter 2: Literature review
Introduction
Within this chapter, the previous literature on the communication primarily on wireless Bluetooth devices is discussed critically. The focus is on the undertaking the review of previous findings and assertion made by other researchers on connectivity that allows sharing of information and data by devices in a given ecosystem such as supported by Bluetooth communication protocol. Given the drastic growth and implementation of Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) as well as conceptualisation of device interconnectivity such as IoT over the past decade, this chapter reviews analysing the findings, discussion, and conclusion of studies with topics. Lastly, it outlines the missing links as a knowledge gap from the literature review in which the study tries to bridge.
Interconnectivity of devices
Connectedness of devices is a concept nurtured by demand for shared and interconnectivity allowing control of others physical components remotely through exchanging of data and instructions. For instance, presently, one can monitoring house temperature, water levels in house reservoir, or do car navigation updates while sitting in the comfort of ones’ sit. The origin of the interconnection of devices, which current under the IoT umbrella, is traceable to investigation on ways in which devices and sensors can interact and identify themselves supported by the Radio-frequency identity (RFID) (Ornes, 2016; Bello, and Zeadally, 2016). Although some researchers have argued that history device connectivity, base its history to development of telegraph and later telecommunication systems, true sharing of information where one device can be controlled from another master device through sending of commands is a new concept that currently under development (Bello, and Zeadally, 2016). Wireless communication protocols that include the Wi-Fi, Zigbee, and Bluetooth have prominence over the past decade due to the low energy usage, portability, and ability to reconfigure to suit the users’ needs. Research conducted by Istepanian (2011) argues that interconnectivity is responsible in advancing the connection with multiple devices, which in return result in enhancement of the processing hence overall efficiency of the device. Similarly, in addition to increasing the devices storage problem, interconnectivity of devices is lauded as pathway towards heightening portability factor of the entire network. According to research conducted by Jara et al. (2013), design of the Bluetooth protocol is driven by need for low-power operation hence for developer it offers a tremendous amount of flexibility, high security grade, and extensive amount of flexibility.
Smart cities (Vehicle to Vehicle (V2V) and Vehicle to Infrastructure connectivity)
The growth in IoT that has had a significant influence on the development of interconnectedness and mobility resulting in efficiency and delivery of services. According to Dey et al. (2016), this interconnectedness of devices within a given ecosystem such as a city, an industry, or home must be rooted on effective communication protocol. As such, due to development and integration of mobile communication systems such as CDMA (Code-Division Multiple Access), GSMA (Groupe Spéciale Mobile) Association), Wi-Fi, and Bluetooth that support transfer of information wirelessly while at the same time allowing reliability (Chou et al., 2009; Sukuvaara, and Nurmi, 2009). Typically, interconnectedness incorporate devices that can interact where one can transmit while the other receive information hence one way or the other affecting the operations or attributes of the others. Although car-to-car communication is thought to enhance automation and subsequently the improve transportation elements such as speed and safety, some issues like the networking and complex city structures limits its implementation process. One notable highlighted concerns range from the challenge of having a shared and common protocol that can share with very small latency and high accuracy levels for transmitting and receive information from cars (Sukuvaara, and Nurmi, 2009; Zhao et al., 2016). Studies have outlined the developments in present transportation system is rooted on the need for performance, security, efficiency, and safety. According to Lu et al. (2014) and Uhlemann (2015), connected vehicles are designed to transmit and receive information aimed at increasing the situation awareness, efficiency in traffic control, and mitigation of accidents through Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication. The solution to parking problems where the space is optimised in urban cities in an efficient, smart, and betterment of traffic flow has led to formulation of several ideas and approaches all using one of communication protocols. As such, this has led to development demand for integrated communication system installed in automobiles, both private and public, aimed at providing insight operation and setting stage for use of infrastructure. Using autonomous driving as a basis of outline the connected on the vehicles (devices), one can regard the cooperative intelligent transport systems (C-ITS) and interactive advanced driver-assistance systems (ADASs) as connected (Masini et al., 2018). Connectivity between vehicles via wireless network allows automobile to sharing messages on factors related to speed, location, braking, travelling speed, and stability of a car. According to Naik et al., (2017), by integrating the dedicated short-range communication (DSRC) with range of between 300-1000 metres it has capability of communicating with different vehicles. Zhao et al. (2016) pointed out that most of the V2V connectivity utilise the sensors, ultrasonic, car, and radar to transmit or receive in real time. Similarly, in the V2I ecosystem, the infrastructure has capability to access vehicles variables accessed or transmitted remotely. Although several protocols can be used to rely and support the communication between the variables, in addition to using DSRC, the other most common wireless technologies used include Wi-Fi, WiMAX, and LTE. The result communicating structure is a mesh network supported by wireless technology that allows interaction among multiple connected entities and communication exchange. In the research conducted by Dey et al. (2016), connected vehicle technology (CVT) utilises wire communication structures and protocol as prerequisite in its design and implementation in order to optimise the resources. Despite increasingly availability of Bluetooth devices ranging from mobile phones, car, and wearable devices, research into interconnectivity of such devices supporting this communication technology is limited. The findings on the implementation and connectedness of devices aimed at enhancing sharing and communication of devices within a given ecosystem reveals that most designers and implementation especially on IoT, V2V, and V2I ecosystems tend to favour the DSRC, Wi-Fi, WiMAX, and LTE more than Bluetooth technology.
Bluetooth interconnectivity
Bluetooth technology is a low cost, short-range radio technologies intended to replace the cable connections between portable devices. As described by Panwar and Misra (2017), it has low power consumption and does not require wiring between two devices as it communicates through radio frequency. Back in 1994 when the engineers from Nokia, Ericson, Intel, and IBM, the name that resonate with most of those who worked on the technology intended to named it personal are networking (PAN) but because of the SEO problem, it was named Bluetooth after the Norwegian king (Seymour, and Shaheen, 2011). King Harald Bluetooth ruled and united Denmark, Norway, and later Scandinavian nation being together people of different backgrounds include religious beliefs. It seems a bit odd talking about a king that used to unite people from different countries and Bluetooth technology, but the developing engineers felt the technology was there to unity the different protocols to the Bluetooth standards. Nevertheless, during development period, the companies involved and later becoming pioneer to the technologies had different programs. In the 1990s, the wireless communication field needed uniting. Numerous companies were developing and competing to produce a wireless technology that allows individuals to communicate with another device without wiring solutions. Engineers at Intel Corporation had been working on program called Business-RF, Nokia had low power RF program while their counterparts at Ericsson had develop similar communication standards but each worked separately and independently (Chadha et al., 2013). Jim Kardach an Intel engineer who used to work on wireless technologies took on the role of bringing various companies together that will use low power, short range with radio connectivity. Reportedly, one day Jim Kardach was reading a book about Vikings that featured the dominance of King Harald. Therefore, Harald took that story and applied it into the technology field. Kardach viewed as an ideal symbol for bringing technologies together so he started to create a logo that consists of two letters, H and B written in ancient letters used by Vikings the initials of King Harald Bluetooth. As such, one can argue the view held by some on relationship between Bluetooth technology and the King Bluetooth by pointing it goes beyond the name but to ideological unification strategy and outcome employed by King Harald Bluetooth reflected by combining forces and skills in implementation of the technology and people during medieval era. Moreover, this perceive can be extended to the current principles and capabilities of the technology where it based on interconnectivity and sharing of information with other devices. Presently, several studies exist on the interconnection and sharing information between different devices, which ultimately leads to control the operation and functionality of a slave device. As described by Tosi et al. (2017), the device is designed to use low energy and forming a key element in providing software to discover devices, query for services, and transmit information. Broadly, it allows devices with Bluetooth integration to communicate by interconnecting with other devices via wireless technology 2.4GHz that is unlicensed with major attribute being power conservation. Heydon (2013) pointed out that although the technology was first introduced in 2004, it has gained prominence lately driven by increased focus on the interconnectivity of components and wireless communication. According to Gupta (2016), the BLE has emerged as leading in performance measured by energy consumption and diffusion rate.
Chapter 3: Technical Background
Notably, a connected vehicle encompasses different communication systems, which either can be potable or embedded that allowing V2V connectivity with other devices. Similarly, this applies to robotic devices connected to others robots or different devices with capability of sharing information. Ericsson mobile communication started developing the first Bluetooth system in 1994 designed to replace the RS-232 telecommunication cables. Its design and implementation was meant to take advantage of the 2.4 and 2,485 GHz radio waves designating for shorter range and lower power alternatives. Although it has undergone through multiple upgrading resulting in release of several versions with better power efficiency and communication range as well information transfer rate, the most recent release still hold standards of point-to-point communication and low power consumption (Harte, 2009; Chadha et al., 2013). Since it development, the technology has widely been integrated into several devices that include laptops, mobile phones, and recent automobiles. Studies have argued on the prospect of integrating Bluetooth technology in device pointing on such elements as compatibility among various versions developed. For instance, the most recent version of Bluetooth (5.0) connects with the previous version without the need from upgrading or additional features. According to Gomez et al. (2012) and Heydon (2013), the Bluetooth low energy throughput and speed particularly in the latest version (5.0) supporting up to 2Mbps and approximately 240 meters overshadows the previous shortcoming that it had brought to the technology. The Bluetooth 5.0 harbours four and two times range and speed respective compared to the older versions, which in turn enhanced the energy usage. Studies argued that its previous power hungry versions made it impractical for many wireless devices especially those like robotic cars favouring the low power usage. Study conducted by Tosi et al. (2017) investigating the throughput, power consumption, latency, maximum range, and maximum connectible devices found that connectable device being less than 10 although greatly depended on the parameters and characteristics of the other device. Even though its theoretical throughput reached the limit of 230kbps, the investigation under actual application indicated it has in the range of 100kbps. These findings outlines the BLE as one of the best devices in connecting and controlling devices within a considerable range and optimization of power. Technically, Bluetooth is designed for communication over a short distance such linking digital camera to personal computer (PC), sharing files between two mobile phones, and connecting mouse to PC. Sending and receiving information via Bluetooth is enabled by radio waves operating at the frequencies between 2402 and 2480 MHz with protocols connecting several electronics devices. The physical level of the Bluetooth transceiver RF consists of the 79 Bluetooth channels spaced at 1MHz. The Link management Protocol allows peered message exchange through reassembling and segmentation of packets in addition to creation of a links and negotiation of packet size. The technology employs the concept of master and slaves under piconet. The master/slave model allowing one device to connect up to seven devices. Furthermore, the technology has a frequency hopping capability used to avoid interference from other devices (Kardach, 2000). Ideally, after the device transmits the packet, the signal hops to a new frequency. The first version (Bluetooth 1.0) of the released in 1999 has a maximum connection speed of 0.7Mbps and typical max range of approximately 10 m whereas the most recent release, 2017, has 3Mbps with EDR and 2Mbps with low energy with maximum range of 240m. Early Bluetooth versions were no power efficient rather consumed a lot of power and slow data transfer but recent updates have seen considerable energy. The technology has ‘controller stack’ and ‘host stack’ protocols where the former is implemented in a low cost

The Bluetooth core protocols capture the baseband, the Link Manager Protocol, Logical Link Control and Adaption – Layer (L2CAP), and Service Discovery Protocol (SDP). The Baseband links the radio frequency between the Bluetooth devices, however, it require point-to-point connections. The link Manager Protocol sets the link between devices supporting Bluetooth. It is responsible for security elements such as encryption and authentication. The L2CAP protocol supports multiplexing, segmentation, and reassembly of packets whereas, the SDP queries and established connection between devices (Miller, & Bisdikian, 2001). On other hand, cable replacement protocol has RFCOMM responsible as a transport protocol with additional provisions. It provides a reliable stream of data through multiple connections. The Telephony Control Protocol defines the control-signalling establishment of data and speech between two devices (Haartsen, 2003). Other key protocols are those adopted incorporating PPP, TCP/IP and WAP/WAE used for transporting packets.
Chapter 4: Methodology
It intended to demonstrate the viability of Bluetooth communication technology in connecting and sharing commands, which ultimately allows controls operation of the other devices, in this case, the robotic car. This project aimed at investigating the communication between two Bluetooth devices. The investigation took the form of implementation of communication structures consisting of master device (USB serial) that transmitted the signal holding commands to be performed by slave device robotic car. The initial ideological view held was that existence and implementation of IoT and other interconnectivity between different devices supported by wireless communication provided a basis for the argument and investigation into this study. Therefore, the premise of designing and investigation of this Bluetooth communication project was based on whether a smart device and robotic car would communicate by exchanging commands and implementation report of the command. As such, this research followed an experimentation approach in its investigation to determine communication between the two devices supported by Bluetooth communication technology. The project deliverables were categorised into two groups based on their respect to or absence of physical features. There were placed under software and hardware classes with the former consisting of the Makeblocker software, Device Monitoring Studio, This study strategized the research process by outline core tasks and variables needed to address the pre-stipulated objectives and aims extensively and satisfactorily. After stipulated the objectives and aims of the study, it outlined the core variables (deliverables) as well as the tasks to be done in systematic manner. Importantly, given that several researchers currently exist exploring wireless communication and interconnectivity between devices, the researcher had to hold an open-minded perspective during initial researching and reviewing of previously done study to avoid developing misinformed or prejudged observation and subsequently conclusion. In data collection, it employed the use of observation. Suen and Ary (2014) described the observation as a systematic data collection involving prolonged engagement and tactical improvisation motivated by having a clear understanding and capturing the setup of the experiment. The critics of this research approach have argued the findings capture is greatly depended on the observer perspective and understanding of the concepts and problems being investigated. In the case of this study, connectivity and transmission of the information were confirmed by observing the changes in light and operation change such as movement of car. These observations were supported by capturing data and subsequently the findings in video, pictures, and screenshots. The pictures and screenshots of the communication between the two devices acts to supported the observation made and subsequently inferences formulated. Authenticity and reliability of the study was maintained by ensuring the information and data from previous studies and this project informing development of knowledge and conclusion made were represented accurately and accordingly.
Chapter 5: Implementation
In this section of the report, it outlines the procedure followed to make the project operational starting from the designing and pissing together various components and boiling down to transmission of information to and from robotic car. Broadly, the chapter talks about the steps of managing the development from planning to data observed as transferred and received information. From the initial stages of the study, the implementation was perceived as core to addressing successful and extensively the aims and objectives of the study. Building from (REF) assertion on the implementation process, this study took the concepts and pre-stipulated problems working on them to see the plans become a reality. The details that include the scheduling (Gantt chart) and deliverables of the study were outlines during planning stages. The figure below show the procedural tasks undertake to attain the aims of investigating Bluetooth communication outlining the systematic tasks taken from identification of core variables to assembly of the components.

After identifying components required to successful address research objectives and aims, the next steps acquiring, which was through either borrowing or purchasing those that were not readily available. Providing those details of the work done in the first term towards the project is very important. It worth noting that purchasing and developing Land raider by Makeblock was part of the project. Laptop running on Windows 10 operating system (OS) was readily available (owned by the research) while such software as Makeblock and device monitor were downloaded freely. After making purchase and once received the robot car, the development of the robot car started immediately and it took thirty minutes to complete the setup of the first stage.
Another core component need was the Bluetooth dongle. This study focused into developing a communication platforms demonstrated by displaying transfer and reception if command from Makeblock software from the laptop to the robotic car. The dongle, Hollong BLE sniffer, was used to analyse the packets transmitted from the master (USB serial via MBlock software) and slave device (the robotic car) and vice versa. BLE sniffer is portable hardware that is designed to capture BLE transmission data between two devices. It has its own software called ViewTool Hollong BLE Sniffer and works great with Wireshark. If the technique works and captures the communication data between the robot car and the smart device, the project will be successful. The figure below show the connected BLE dongle device. As part of the project, purchasing a Makeblock USB (Universal Serial Bus) dongle that works only on Makeblock devices came under the development.

This is because reading the transmission from the USB (Universal Serial Bus) dongle was part of the investigation towards the project. Makeblock USB (Universal Serial Bus) dongle operates in BLE (Bluetooth low every) V1.0 and it can transmit in distance between 1cm to 15 meters around empty areas. The only way it works is through a device that supports Bluetooth module as well as serial port. Since the projected used a Hewlett-Packard (hp) laptop that supports Bluetooth communication enabled, the USB dongle automatically paired and started to transmit the instructions that the programming generates from the Makeblock software. The robot car received the instructions, performs the actions communicated, and then returns the feedback via the USB dongle. The second part of the development involved towards the project was installing the software of Makeblock. The software is free of charge and is available at www.makeblock.com. It did not require any complicated actions to install. All it required was the compatibility of the operating system, which is Windows 10 that supports 64 bit the same as the HP laptop that is part of the project. The figure below show the opened interface of the MakeBlock (mBlock) software showing connecting ports and commands.

In addition, Wireshark software was downloaded and installed on the laptop. A software that allows analysing and capturing live radio frequencies within the area of the connection is the ultimate target. The requirement of the software is to have an operating system that supports the software as well as storage capacity space that allows the software to install successfully. Network card and Bluetooth module device installed in the computer is also compulsory to analyse and capture the packets of the radio frequency transmission. In essence, the installation of the software on the laptop completed the setup and installation procedure. For the robotic car to operate a power was required. Even though initially the projected had intended to use the batteries supplied with the robotic car, the problems with regular replacement after short period of usage and low power supplied by rechargeable batteries prompted the connecting directly to the electricity supplier with the help of power regulator. The power supply regulator shown below aided setting the power to the required levels.

During the implementation process, the laptop displayed whether the connection process was a success by indicating the transmission and receivership of send command. In particular, the device monitor software combined with USB serial module monitored, logged, and analysed what was happened after the between the laptop and the connected robotic car. For instance, after setting up the components, a command was send to determine whether the devices shared information indicated by either steady blue show connection or a blinking blue light meaning the Bluetooth integrated devices were not paired. The setting up procedure, the following design was maintained.

The diagram above highlights the four fundamental components and flow of communication of the project.
Chapter 6: Results and Discussion
This chapter outlines the findings of the research by capturing the results of transmitted and received packets from the USB serial to the robotic car. The subsequent section covers the discussion of the findings with relation to previous conducted research and inferences in the field. Notably, the focus of this study was to investigate by establishing the communication structure that allows transmission and receivership of packets (information) between two devices via Bluetooth low energy (BLE) communication protocol. In order to accomplish the outlines objectives and aims, the project acquired deliverables such as robotic car (as a receiver), USB serial (transmitter), and BLE dongle device as hardware while software part consisted of mBlock, device monitor, and Wireshark. It is also work mentioning that Monday, an online scheduling software, was used in planning and monitoring progress and completion of tasks. After setting up hardware and software (infrastructural aspects), a signal was sent from the laptop device using the MBlock software to the car while displaying the outcome of the communication on the monitor. The structures were found to be exchanging information observed by operations commanded to be done being performed by the car. Screenshots attached illustrate the communication or fail of between the two devices where they capture the command sent and feedback received.
Establishing communication link
The screen below of the device monitor show the USB serial (CH340) was connected and running at computer port 7 (COM7). The USB module was tested by manually removing from the port (disconnecting and breaking the connection) aimed at checking and confirmed the communication established with the robotic car. Under the technology building blocks is Core Specification (CS) that is used in creating interoperable devices (car and BLE dongle device). However, specification of each Bluetooth devices id overseen by Bluetooth SIG Working Groups to take into consideration evolution of technology and market needs. The Wireshark captured the BLE link layer format displaying as the outermost layer of the packet. The links contains Access Address, CRU, and PDU content. The advertisement data consisting of the short name of a device, manufacturer-specific data, and flags

Similarly, Hollong BLE sniffer software that displays Bluetooth devices in range as well as showing whether connection has been established or failure of by indicating in status bar. It also displaces such variables as received signal strength indication (RSSI) measuring the power present in received radio signal. Notably, the RSSI value does not remain constant but rather varies.

Move forward command
After confirmation of presence of devices and established communication, several commands were send to the car to perform different tasks and operations. First, it was investigation the moving forward where a move forward command was sent from the mBlock software to the car.
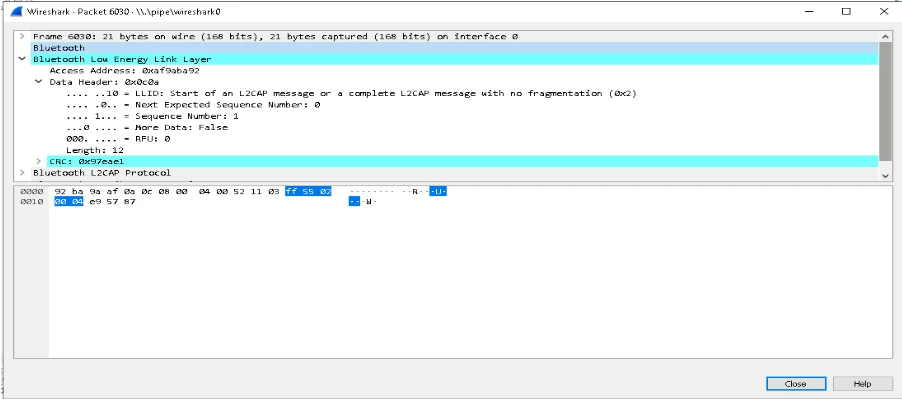
The Wireshark view below shows the packet exchanged by the two devices after forward command was input. Wireshark is an open packet sniffing program capturing packets and protocols, which it subsequently analyse determining instructions of the command. As indicated below, the Wireshark shows the packets sent (168 bites) where 21 bytes were captured on interface 0. In addition to indicating the access address (0x50657b2e), the module shows expected sequence and CRC data
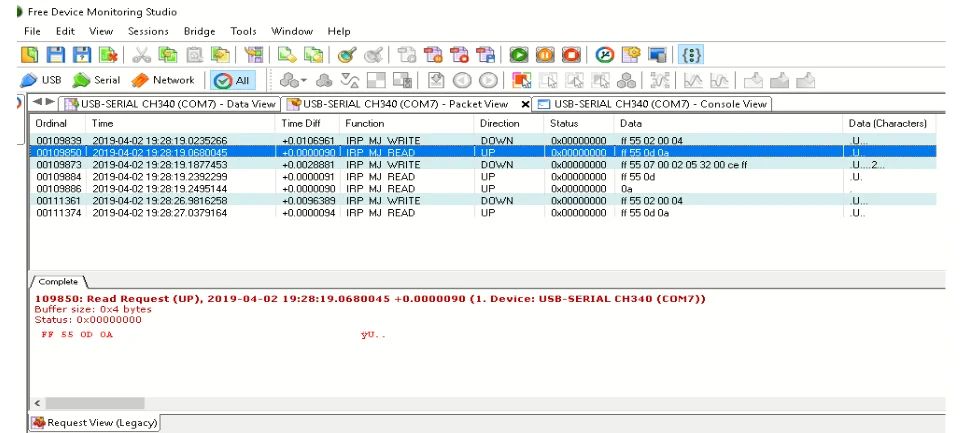
Serial port monitor.

The highlighted row shows the UP direction indicating a forward movement of the car. Therefore, it means the command was received by the car and executed making it to move in forward (up) direction. The Wireshark interprets the commands sent from the mBlock software to the car with display module showing on the completion or failure of the requests. For instance, at 13:15 a request for up was received by the car device from USB Serial (COM7).
Backward (reverse) command
In order for the car to move in the backward direction, a bot program named ‘run backward’ perceived as a command was moved from the scripts section to action console of the mBlock software. Notably, speed at which the car was also indicated from the bot.

Similar to that for forward instructions, the image above shows the time of current and previous captured packet received, frame, and protocol used. As it can be observed from the image below (figure 6.6), Bluetooth connection was established and access granted
The device monitoring module below shows the request send and received by USB serial and car devices respectively with each having time stamp. Sending the request for reserve/backward movement is shown by the module by acknowledgement of reception and transmitted packets.
The data view of the device monitoring device show the car received (reads) the instructions and subsequently transmitted back to the USB serial. This is supported by packet view (image 6.8) showing connection established and direction taken by the car.
Turning right/left
Furthermore, left and right turn instructions were sent to the car. The following are screenshot images of the results were capturing collectively acknowledging communication between the devices. Although, the interpretation of the received request while responding appropriately to the sent and received information is a complex process involving representation of turn to be taken.

6.1: Discussion of Results
Historically, sharing of information has been founded on direct link between communication agents through either share physical connection or sending an agent entrusted to ferry information or a signal from one element to another. Ideally, the success of communication is rooted on effectiveness and timely delivery of shared information passed by one entity to another with accuracy being point of emphasis. History of communication affecting and influencing direct human being, their living environment, and ways relating disregarding the biological aspects is traceable to development of sound, cave drawing, messengers, smoking signals, web, to currently artificial intelligences supporting communication among electronic devices. Although changes have been felt extensively on ways people pass information to other individuals and current electronic devices from traditional word of mouth to electronic signals, advancing effectiveness through timely delivery, consistence, simplicity, and feedbacks have formed principle of communication. The informal forms of communication, which included word of mouth, sending messengers, in some communities, horn blowing, drums beating, smoke, and fire lighting were the dominated societies before industrial and technological evolutions leading to morphing electronic and binary driven communication mechanism. This evolution of communication was based on desire to perform task effectively and quick especially transferring information over long distances. The invention of electrical telegraphy in 19th C attests to this need. Employing the use of analogue magnitudes of electrical signal to convey information from one point to another permitting people and organization to share messages over long distances, the telegram, also regarded as electrical telephony, forms the first form of telecommunication. Analysing and tracking the progress towards the project is the key to meet the schedule plan set towards this project.
6.2: Project management and progress
Therefore, creating a Gantt chart that shows the duration of each scheduled and completed task undertaken in the project is important at this stage. It shows if the project is falling behind or if the project will be completed on time. Below will be included a couple of screenshots that shows the plan that is created for this project. Monday.com website was used to generate the Gantt chart. It can produce a chart with a calendar that is synchronized with the project. As part of the project, first target in the Gantt chart was to start writing the project proposal. It started on the 7th of October until the 23rd of October.
Managing to accomplish tasks successfully and on time without any falling back to the target of the study took precedence because it was perceived that undertaking and completing tasks within scheduled time enhanced that chance of addressing the objectives adequately while at the same time obtaining accurate outcome. The second target in the Gantt chart was submitting the final project proposal through Weblearn on the 24th of October. Therefore, achieving it and submit ting the project proposal on time was also met on time. The progress continued towards this project by ordering the robot car with the Bluetooth module through Amazon. As can be observed from the screenshot, the hardware was ordered on the 28th of November 2018 and received it on the 2nd of December 2018 without any damage to the product. On the 3rd of December, it was all about researching through the internet and finding a software that enables to analyse and capture Bluetooth packets between the smart device and the robot car with the Bluetooth module. To find an open source software called Wireshark that captures almost all the types of wireless networks was achieved and listed under the Gantt chart. Finding software that enables to capture Bluetooth communication was one of the challenging stages in this project as it took two days. However, overcoming those challenges was achieved on time and was able download the software. On the 7th of December, difficulties occurred to capture the packets between the two devices, which made things, complicated. A Bluetooth USB dongle was decided to be ordered through amazon that allows individuals to pair the robot car which only supports Makeblock. The USB dongle arrived on the 10th of December. It shows clearly on the figure 1.0 how the steps were planned. Wireshark could not capture the communication between the two devices therefore, deciding to carry out another research that bypasses the Bluetooth communication and read the data from the Bluetooth USB dongle was the new target for the progression. On the 14th of December, downloading serial port monitor software that monitors any USB port that acts as a serial port has been installed in the computer. The software worked and managed to read the communication between the two devices. As part of the ongoing progression towards the project, Hollong BLE Sniffer was identified and order on the 7th of January. It is a hardware that captures BLE transmission. Based on the researches carried out online, it works with Wireshark and captures any Bluetooth connection. Being ahead with the project indicates there is a time management involved, determination as well as the aim to finalise the whole project before the actual deadline.
Chapter 7: Conclusions and Further Work
7.1: Conclusions
The aims of this study was to investigate the Bluetooth communication. The actions that took place towards the investigation of the Bluetooth communication device covered the hardware purchases that were including its software. It used Makeblock robotic car as a slave devices being controlled by the USB serial (master device). Makeblock is a private Chinese technology company headquartered in Shenzhen, China, that develops Arduino based Hardware, Robotics Hardware, and Scratch based Software. The background and review of the literature found a wide conceptualisation of wireless communication that include using such technology as Bluetooth and Wi-Fi to monitor and control remote of device. The interconnectedness of device through sharing of information is greatly demonstrated by recent rise of vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), and internet of things (IoT). The robot car that had all the specifications towards the success of the project and was available on the market that suited the budget was Land Raider by Makeblock. Societies including the cities and industrial environments are increasingly becoming smarter through the use of information and communication (ICT) to uplift and enrich city life collective life. Broadly, the shift of the most cities to integration of data and interconnecting core components is driven by need for planning in a city. The findings indicated current progression of certain researches that has been carried out with the results of the ongoing development of the field. With the aid of the BLE dongle, mBlock software, device monitor software, and USB serial, the instruction send from the laptop were received and successful controlled the car to move forward, backward, and turn either right or left. Having said that, mentioning how to investigate in more than a single way to capture the communication between the two devices and display the information on the monitor through software called Wireshark and Serial Port Monitor.
During the planning and implementation of the project few challenges were encountered. Nevertheless, the main concern encountered was the rate at which the car consumed the batteries power forcing regular replacement or using rechargeable batteries. However, the latter option was perceived not viable and long-term solution because the energy from the recharged batteries was considerable weak to power the car while regular replacement was considerably costly. Therefore, borrowing a power regulator was considered in order to solution the power problem and, at the same time, saving financial cost.
7.2: Suggestions for Further Work
In terms of the future work, Bluetooth technology has become more common communication protocol especially established over a short distances and core factor being energy conservation. As such, using the BLE dongle enabling two devices to communicate using BLE protocol was used in this project. However, the project can be tackled from a different angle that is by reading the serial port between the transmitting and receiving devices or read the data from the direct memory of the robot car Atmega 2560. Additionally, one can develop a multi-communication design where more than one car to receive and be controlled from a common (one) Bluetooth transmitting device. The design can be viewed sin the form of one master sending command to several robotic cars (slave devices).
References
- Asadullah, M. and Ullah, K., 2017. Smart home automation system using Bluetooth technology. In 2017 International Conference on Innovations in Electrical Engineering and Computational Technologies (ICIEECT) (pp. 1-6). IEEE.
- Bello, O. and Zeadally, S., 2016. Intelligent device-to-device communication in the internet of things. IEEE Systems Journal, 10(3), pp.1172-1182.
- Bello, O. and Zeadally, S., 2016. Intelligent device-to-device communication in the internet of things. IEEE Systems Journal, 10(3), pp.1172-1182.
- Chou, C.M., Li, C.Y., Chien, W.M. and Lan, K.C., 2009, May. A feasibility study on vehicle-to-infrastructure communication: WiFi vs. WiMAX. In 2009 tenth international conference on mobile data management: systems, services and middleware(pp. 397-398). IEEE.
- Dey, K.C., Rayamajhi, A., Chowdhury, M., Bhavsar, P. and Martin, J., 2016. Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network–Performance evaluation. Transportation Research Part C: Emerging Technologies, 68, pp.168-184.
- Dong, F., 2015. The Comparison and research in low power consumption between ZigBee and Bluetooth technologies. In 2015 2nd International Conference on Electrical, Computer Engineering and Electronics. Atlantis Press.
- Gomez, C., Oller, J. and Paradells, J., 2012. Overview and evaluation of bluetooth low energy: An emerging low-power wireless technology. Sensors, 12(9), pp.11734-11753.
- Hilbert, M. and López, P., 2011. The world’s technological capacity to store, communicate, and compute information. science, 332(6025), pp.60-65.
- Jara, A.J., Zamora-Izquierdo, M.A. and Skarmeta, A.F., 2013. Interconnection framework for mHealth and remote monitoring based on the internet of things. IEEE Journal on Selected Areas in Communications, 31(9), pp.47-65.
- Jia, D. and Ngoduy, D., 2016. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication. Transportation Research Part B: Methodological, 90, pp.172-191.
- Lu, N., Cheng, N., Zhang, N., Shen, X. and Mark, J.W., 2014. Connected vehicles: Solutions and challenges. IEEE internet of things journal, 1(4), pp.289-299.
- Masini, B., Bazzi, A. and Zanella, A., 2018. A survey on the roadmap to mandate on board connectivity and enable V2V-based vehicular sensor networks. Sensors, 18(7), p.2207.
- Ornes, S., 2016. Core Concept: The Internet of Things and the explosion of interconnectivity. Proceedings of the National Academy of Sciences, 113(40), pp.11059-11060.
- Pizzi, P.J., 2017. Connected Cars and Automated Driving: Privacy Challenges on Wheels. Def. Counsel J., 84, p.1.
- Rutishauser, U., Kotowicz, A. and Laurent, G., 2013. A method for closed-loop presentation of sensory stimuli conditional on the internal brain-state of awake animals. Journal of neuroscience methods, 215(1), pp.139-155.
- Miller, B. A., & Bisdikian, C. (2001). Bluetooth revealed: the insider's guide to an open specification for global wireless communication. Prentice Hall PTR.
- Viterbi, A.J., Viterbi, A.M. and Zehavi, E., 2010. Performance of power-controlled wideband terrestrial digital communication. In The Foundations Of The Digital Wireless World: Selected Works of AJ Viterbi (pp. 149-159).
- Zhao, J., Chen, Y. and Gong, Y., 2016, May. Study of connectivity probability of vehicle-to-vehicle and vehicle-to-infrastructure communication systems. In 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring) (pp. 1-4). IEEE.



- 24/7 Customer Support
- 100% Customer Satisfaction
- No Privacy Violation
- Quick Services
- Subject Experts