Review of Robotic Hand Control Systems
Literature Review
The literature review is simply a narrative review. It normally covers the current knowledge accompanied with substantive findings regarding a certain or specific topic. In addition, a literature review contains both the methodological and theoretical contributions made towards a specific research topic. In reviewing the knowledge, findings and other contributions towards “Robotic hand controlled by flex sensor mounted in global”, the literature will keenly observe the knowledge and findings regarding the robotic control systems, the use of flex sensors, components that have been used before in designing the animatronic robotic hand and the thought of a robotic hand that is controlled by the flex sensors.
History of robotic hand
The Robotic Hand (The Art)
It is of interest that the project would still find interest in the InMoov hand, which is thought to be a humanoid robot said to be developed from the 3D printable plastic body, InMoov is also controlled by the Arduino microcontrollers and meant to address the artistic purposes. MyRootLab is essentially used as software in regulating the movement of the hand. The program is normally written in Java but still some of the programmers would find use of the Python. The growing interests in humanoid robotics accompany this with applications drawn towards prosthesis and orthosis for the human beings (Taylor et al. 2016). Commonly, developers would find meaningful use of the hand architecture and 3D printing. However, the use of object connex350 3D printer is common among most of the designers.

While the robotic hand may sound like a new idea, some of the experts already development while others are working on different ideas that can improve the current systems. Doshi et al. (2015) confirmed on recent advancements that are said to appear embedded in some of the systems as noted with haptic technology. Surgical robots like Zeus, Da Vinci, and Cardio-arm are said to perform different complex surgeries with high accuracy as well as minimum invasion. Bilgin et al. (2016) gave a case study of the Shadow Robot Company, which once designed a robotic hand said to resemble a human hand. This was made possible through the automatic attitudes of the objects by the help of the artificial neural networks and the wavelet theory. In the modern era, more sensitive prostheses hands are said to have been developed with the help of the wireless feedback and the functions of the 8-bit microprocessors. The key part of the system is communication, which is carried out wirelessly. Bilgin et al. (2016) confirmed that the most interesting side is how the system is able to capture data from the environs and make use of it to generate appropriate output, which can influence the movements. There is a whole study of the control systems that highlight how devices communicate before generating an output (Slaughter et al. 2008). However, the context may take the following chart showing decision-making points and points of actions.


Wireless communication is more convenient in terms of receiving data from stationary and mobile units. In the study of the robotic hand controlled by Flex sensors, one would not miss the RF 433 MHz module. The module is easy and of low cost in the market. Data from the flexible sensors is normally sent to the servomotors while developing a protocol that will discriminate data (Sun et al. 2016). The reception of analogue data from the physical environment, fingers, would then be converted into digital values before the same conversion is done to angle values. The values are integer types and char types as some of them are assigned to RFF 433 MHz module. Commonly, the angle values extracted from flexible sensors would then be linked to analogue outputs of Arduino, which is normally mounted on the designed glove.
Movement (Servo motor)
The study of the robotic control systems has attracted different researches. Bilgin et al. (2015) made significant findings concerning the robotic control systems, which are being used in almost every industry. The rise of new technologies and development of new research centres constitute an effort that has been lauded by many scholars around the world. The initial prosthetic robotic hand only had three fingers and a single thumb. This was developed by MIT and Utah University in the year 1986. The achievement was largely bolstered by the studies around the mobility behind the constriction purpose machines. Towards the end of 1990s, robotics grew into an interesting area that attracted the interests of NASA Johnson Space Center, which remains memorable for working on a new robotic handout. By the year 2000, the Resolved Inter-Joint Decoupling Solver (RIJDS) and Resolved Inter-Finger Decoupling Solver (RIFDS) became the key processes that facilitated the non-diagonal stiffness as designers fostered more flexibility across most of the robots. Bilgin et al. (2015) further points out that each robotic system should carry a control module for it to perform the intended functions. The control systems in robotics give room for movement of different parts of the entire robot. The notion and the significance of having a control system have been supported by the findings established by Ibrahim and Alexander (2016). The findings established the fact that the human-robot teamwork plays a critical role in boosting the efficiency of the relevant mechanisms that are used in robots. The modern robotic control systems are more revolutionized, which makes the robots more user-friendly and versatile. Ibrahim and Alexander (2016) further confirm that PID controllers are currently controlling over 90% of the robotic functions in the industries. Servo motors would be implemented to cause movements in the system. They are thought to be effective because they can use the feedback in determining the exact position of the entire shaft. The integration of such capacities like flexible engineering parents the Robot Path Planning while designing and developing the systems (Rus and Tolley 2015). This confirms a migration in terms of the Robotic control systems, which seem to move from the traditional PID to better systems such as the neural networks and AI among other technologies. Apart from the industrial use, young designers can simulate their robotic systems by the help of the simple control devices like Arduino as pointed out by Azar and Zhu (2015). When using such simple tools, the robot unit would always receive transmitted data from XBee receiver before it can be transferred to the Arduino mega. The Arduino gadget would then analyse and generate significant signals, which can change position, in an angular way, of the involved servo motor. This is as shown in the following diagrams. The Arduino servos are gaining attention every other day. Unlike the DC motors, most of the servo motors can be positioned using the control signal and the shaft will retain the position until a different signal is triggered (Azar and Zhu 2015). Servomotors can be categorized in different classes depending on the capacity, type of sensors used and type of the controllers introduced in the system.

Sensors
A flex sensor is one of the most common sensors in constructing robots. The wide application of the flex sensors has attracted different researches that have shown interest in developing automated systems both for industrial use and for testing a particular line of technologies. Saggio (2014) notes that the Flex sensor is a patented technology that works based on the simple principles of the resistive carbon elements. While working as a printed resistor, the sensor is able to achieve a form-factor when placed on thin flexible substrate. The moment the substrate is bent, flex sensor yields resistance that can be correlated to bend radius. Saggio (2014) insists that the spectra symbol is normally used while supplying the flex sensors for the P5 gaming glove, Nintendo Power Glove. Various applications of the flex sensors are not limited to medical devices, industrial controls, and computer peripherals, measuring devices, automotive controls, virtual reality games, and physical therapy among other uses.

Wong and Salleo (2009) explored on a number of applications and working principles of the Flex sensor. The authors insist that the status of knowledge largely favours a number of the hardware combi9nations. The first area of focus includes Flex sensor when used as a goniometer. This is common across the rehabilitation research while measuring the movements made by fingers. Wong and Salleo (2009) insist that a normal mechanical goniometer is likely to take more time while making the measurements with poor repeatability. However, a goniometer glove is quite automatic with high repeatability. Giovanni Saggio who used a simple principle of coating the carbon resistant element on the plastic substrate made Establishment of the uses of the flex sensor in the goniometer gloves possible. Saggio then designed the electronic circuit for the purposes of capturing the resistance values that keep cycling across the sensors. This further trigger the A/D conversion as the system sends significant details to the computer. The same setup of the goniometer glove has also secured applications in people with dysfunctional hands where such parameters of reliability, fidelity, and repeatability were confirmed. The wireless transmission as well as user acceptance was confirmed by Lisa Simone as indicated by Sreejan and Narayan (2017). The sensor signals are said to have been sampled through the as bit A/D. At the same time, the wireless protocol was chosen for the personal area networks.

Other applications include serving as a HDMI device-sensing element. Commonly, the HDMI devices would help one to interact with machines while using the hand gestures. The glove that was constructed by Saggio was meant to interact with relevant virtual 3D gadgets or objects.
Wireless Radio Transceiver
Movements measured are those of the electrical signals triggered by the hand furnish (Sreejan and Narayan 2017). The signals are eventually converted into either movements or actions. Besides, the use of ZigBee protocol provides low power networking standard and would be used wirelessly to record key details through the Wireless Personal Area Network (Azar and Zhu 2015). Another area of application of the flex includes detection of landslides. Senthil Kumar and Amrutha Joshy once developed the sensor system, which could identify the landslides. Every sensor carried a Micro Electro-Mechanical Systems and flex sensors as the User Datagram Protocol played the key role in sending as well as receiving data. Finally, the flex sensor is used as the obstacle contact sensor. On the mobile system such as the autonomous mobile robot, flex sensor is applied in detecting the direction of the contact parallel and contact state. Normally, four flex sensors would be used mechanically in a contact-detecting ring while wiring it to the low cost electronic module before it can sense the obstacles.
Apart from ZigBee, wireless radio transceiver can be attained through the NRF 24L01, which is primarily configured to the receiver that can receive data via different data pipes. Commonly, a data pipe would have a unique address and would end up sharing similar frequency channel. This kind of communication gives room for application of the data pipe address which can acknowledge the reception of packets. The use of NRF 24L01 avails a number of benefits that are not limited to reduced current consumption as a result of sharp timing and short time while operating in traffic. In addition, the system leads to lower system cost given that NRF 24L01 has the capacity of handling high-speed link layer functions or operations.

Technical research - System processors (controller)
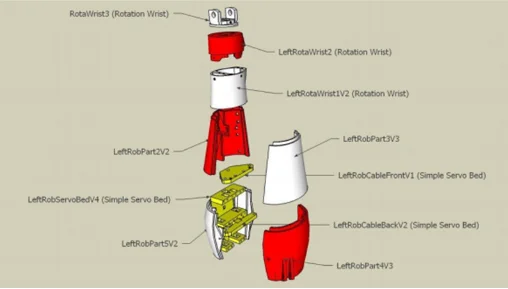
While designing the animatronic robotic hand, one would be interested to understand or to note the key components that are incorporated in the design. In et al. (2015) noted that the functions and features should be well integrated to achieve the ultimate goal of the design. In designing the animatronic robotic hand, In et al. (2015) indicate that it is always good to have block descriptions of the system even before establishing the flow of the processes. According to the findings established by Shull and Damian (2015), block descriptions of the glove would involve description of every part of the system including the characteristics of the components.


The flow of the processes when the system active would appear as shown below

Based on the block descriptions indicated by In et al. (2015), the first part of the glove is power source, which can be a 9V battery. This provides the necessary power to the motors, current sensors, flex resistors as well as microcontroller. Another key component is the microcontroller, which plays the key role of receiving significant signals form the flex resistors and sensors. The data received would be analysed before converting it to digital signals with the help of an Arduino, which has an ADC. The conversion ensures that the system has digital signals, which can easily be transferred to the robotic hand wirelessly (Rus and Tolley 2015). Notably, the microcontroller would still receive the analogue data form the hand pressure sensors and process it for the system to determine the duty cycle and the motor speed. This leads to sensations of the feeling of an object. Another component is the speed control system, which has a module carrying a current sensor that reads the current, which is drawn by servos. The same current would be sent to the control unit, microcontroller, where the torque is normally determined (Kappassov et al. 2015). Another component is the Flex resistor, the wireless communication, the glove frame design and the motor. It is of interest that glove frame design would force the glove to rest on the plan as the motors are mounted on the box, one for the intended thumb and the other one is for the finger index. The rotor hand design would still almost similar components. These still include the power supply, the motor, the microcontroller, pressure sensor, and wireless communication among others (Rus and Tolley 2015). Nevertheless, the force sensors are connected in series with significant fixed resistor for the purposes of measuring voltage drop that appears on the flex resistors. There are different models that would be used for the robotic design. Such models include the haptic and the haptic technology, which rely on the tactile feedback. The haptic interfaces would trigger tactile sensations before movements are made between distant users or between the body parts.
Bibliography
Bilgin, S., Üser, Y. and Mercan, M., 2016. Robotic Hand Controlling Based on Flexible Sensor. International Journal Of Engineering & Applied Sciences, 8(4), pp.49-58.
Doshi, M.A., Parekh, S.J. and Bhowmick, M., 2015. Wireless Robotic Hand Using Flex Sensors. International Journal of Scientific and Engineering Research, 6(3).
Shull, P.B. and Damian, D.D., 2015. Haptic wearables as sensory replacement, sensory augmentation and trainer–a review. Journal of neuroengineering and rehabilitation, 12(1), p.59.
In, H., Kang, B.B., Sin, M. and Cho, K.J., 2015. Exo-Glove: a wearable robot for the hand with a soft tendon routing system. IEEE Robotics & Automation Magazine, 22(1), pp.97-105.
Polygerinos, P., Wang, Z., Galloway, K.C., Wood, R.J. and Walsh, C.J., 2015. Soft robotic glove for combined assistance and at-home rehabilitation. Robotics and Autonomous Systems, 73, pp.135-143.
Wong, W.S. and Salleo, A. eds., 2009. Flexible electronics: materials and applications (Vol. 11). Springer Science & Business Media.
Biswas, S., Chakraborty, P.P. and Islam, A.J., 2015. Design of A Tele-Operated Robotic Hand With Imitative Feature.
Bedaf, S., Marti, P. and De Witte, L., 2017. What are the preferred characteristics of a service robot for the elderly? A multi-country focus group study with older adults and caregivers. Assistive Technology, pp.1-11.
Vaidyanathan, S. and Volos, C. eds., 2016. Advances and applications in nonlinear control systems (Vol. 635). Berlin, Germany: Springer.
Sun, W., Zhang, Y., Huang, Y., Gao, H. and Kaynak, O., 2016. Transient-performance-guaranteed robust adaptive control and its application to precision motion control systems. IEEE Transactions on Industrial Electronics, 63(10), pp.6510-6518.
Slaughter, D.C., Giles, D.K. and Downey, D., 2008. Autonomous robotic weed control systems: A review. Computers and electronics in agriculture, 61(1), pp.63-78.
Kappassov, Z., Corrales, J.A. and Perdereau, V., 2015. Tactile sensing in dexterous robot hands. Robotics and Autonomous Systems, 74, pp.195-220.



- 24/7 Customer Support
- 100% Customer Satisfaction
- No Privacy Violation
- Quick Services
- Subject Experts