Core Type Transformer Design
Task 1:
a. Main core types of transformers and how they operate
In a core type transformer, the both primary and secondary windings wound outside encircling a rectangular-shaped core ring. Mostly, these types of transformers are used in high voltages applications to correspond to the high flux produced as well as accommodating high insulation required in HV.
Power transformers: like any other transformer, power transformers employs induction principles to transfer electrical energy from one electrical circuit to another. However, it is used in the purpose of heavy load and high voltages (more than 33KV) electrical circuits with primary and secondary coils placed on both limbs and share magnetic circuit.
Distribution transformers: Operates with same principles as power transformers, but at a lower voltage and load. Normally, used to step down power to less than 33KV (industrial application) and 220-440V (in domestic use).
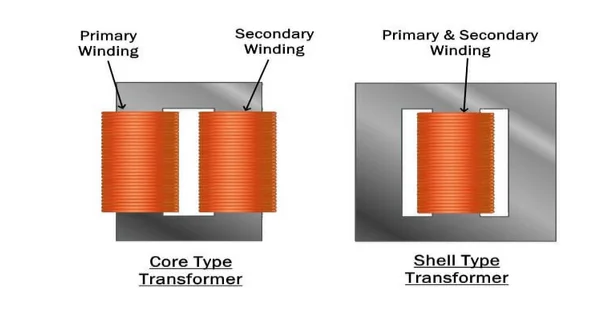
The biggest advantage of such core type transformers comes from ease of maintenance and repair, coupled with ease of cooling and ventilating its windings. The design of windings, arranged concentrically, result in less leakage flux. Additionally, such transformers have higher efficiency and better regulation.
b. Main applications of transformers
Depending on transformer design, construction, and size, application varies. It include
Stepping up and down electrical power through increasing or decreasing alternating voltages and current
Used to isolate electrically power circuits
Used for impedance matching by increasing or reducing the line capacitance, inductance, or resistance.
Instrument transformers such as current and potential transformers are used as measurement instruments measuring such components as current, voltage, and power

c. Main connections of three-phase transformers
Main connection in 3phase transformers are:
Star-star
Delta-Star
Delta-Delta
Star-Delta
The star-star transformer connection has both primary and secondary winding connected in star configuration. Used only in a balanced connected load. The ratio of the primary to secondary line voltage is equal to transformation ratio. The Delta-Delta configuration, on the other hand, has both primary and secondary winding wound in delta connection. The configuration is mostly in large, low-voltage connection.
In a Star-Delta configuration, the primary winding is star connected with grounded neutral while secondary winding takes delta connection. It is mainly used to step down transmitted power at the substation. Whereas, Delta-Star transformer has its primary winding connected in delta configuration while secondary take star format. It used to provide a 3-phase 4-wire connection. Such connection result in secondary line voltage being in the format of √3.
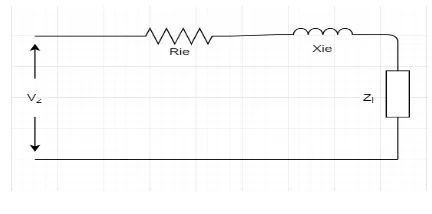
d. Equivalent resistance
Primary: windings 500 turns, Resistance: 0.3 Ω, reactance: 2 Ω, Secondary: windings 100 turns, Resistance 0.1 Ω, reactance 0.1 Ω
Note:
Rie -Equivalent Resistance referred to primary side
N1=500; N2=200; R1=0.3 Ω; R2=0.1Ω
Rie= R1 +R2(N1N2)
=0.3+0.1(2.5)2
=0.925 Ω
Xie-Equivalent Reactance referred to primary side
Xie= X1 +X2(N1N2)
= 2+0.1(2.5)2
=2.625 Ω
Phase angle
∅=Rie/Zie
=0.925/2.783
=70.590
Equivalent resistance referred to primary
e. 200kVA rated transformer has a full-load copper loss of 1.5kW and an iron loss of 1kW
Determine the transformer efficiency
At full load (ratio =1)
Transformer rating -200kVA; Full-load copper loss -1.5kW; Iron loss- 1kW
Transformer efficiency (at pf= 0.85)
η= kVA rating*pf/kVA rating+losses
=200*0.85/200*o.85+2.5
=170/172.5
=98.55%
At half load (ratio =0.5)
η= Output power/Output Power
η= Output power*pf/Output power*pf+losses
η= 0.5*200*0.85/0.5*200*0.85+2.5
=97.14%
Maximum efficiency at pf 0.89
For max. efficiency
Iron losses =Copper losses
ηmax= Output power/Output Power
=200*0.89/200*0.89+2
179/181
98.34%
Task 2:
a. Analyse operation of induction and synchronous motors
Operation of induction motors
Also referred to as asynchronous motors, induction motors works with the principles of electromagnetic induction where magnetic field in the stator windings induces electric current in the rotor. Suppled an alternating current (AC) to the stator produces an alternating flux around its winding. The alternating flux produced called rotating magnetic field (RMF) revolves with synchronous speed. The rotor conductors are short-circuited with the induced emf producing rotor current that in turn produces alternating flux around the rotor. Electromagnetic induced current on the rotor causes it to rotate based on the Lenz law. The rotating rotor will try to catch up with the relative velocity of the rotating stator alternating flux but it always lags, hence the name asynchronous motor. Mainly used in industrial application (conveyors belts, crushers, and centrifugal pumps) because of there are reliable, economical, and self-starting. Household appliances such as household appliances such as fans. On the other hand, synchronous motor has its rotor rotation in same speed as frequency of applied ac. Unlike the induction motor, rotor in the synchronous motor has a permanent magnet that get in sync with rotating induced magnet field on the stator. Fundamentally, the speed of these type of motors depends on the frequency of the applied current. The stator poles and rotor poles are coupled magnetically resulting the rotor rotating at the synchronous speeds (Ns). The motor needs to be energized normally powered by DC power source during starting. Owing to its speed, synchronous motors are used where precise and constant speed are required such as in clocks, positioning machines, record players, and robots.
b. Induction motor, assume stator to rotor turn ratio is 4
i. Starting Torque
Induction
400v; 4pole; 3 phase (3∅); Frequency 50Hz; ratio 4:1; R2- 0.01Ω; X2/phase 0.1Ω
i. Starting torque
Tstart= 3/2πNs*E2*E2*R2R2/*R2+X2*X2
Ns=120f/p
=120*50/4
=1500rpm
In sec, 25rps
k=Rotor to Stator turn ratio =1/4
E2= k*E1 =1/4*400/√3
Tstart =3/2π*25*57.732*0.01/0.012+0.12
=63.03N.M
Slip at which maximum torque will occur
S=R2X2 =0.010.1 =0.1
Speed at which maximum torque occurs
Nmax =Ns(1-Sm)
=1500(1-0.1)
=1350rpm
The value of maximum torque
Tmax= 32πNs*sE22*E2R22+s2X22
Substituting
Tmax =630.31N.M
Full load torque if full load slip is 4%
SFL=0.04
Torque Full load= 32πNs*sFLE22*E2R22+s2X22
=219.485NM
c. Different methods of starting induction motors and synchronous machines
Starting induction motors
A three-phase induction motor is self-starting. A rotating magnetic field is produced by connecting the stator to a three-phase supply, the result rotor starting to rotate. The motor can be started by connecting by applying reduced voltage, using autotransformer, star-delta starter, or connecting directly to full voltage. Direct-on-line (DOL) involves connecting a motor directly to the supply. In this approach, starting current is usually considerably very high, (5-7 times the motor rated current). Similarly, the torque is normally between 1.5 and 2.5 times full load torque. Setting up DOL, a starter consisting of a contactor controlled by push button that is used to energize and close supply to the motor is included. In a reduced voltage approach, resistors connected in series with stator windings are fitted to the supply lines reducing the voltage to the stator. The starting voltage is reduced considerably by approximate half compared to DOL approach. Given that starting Torque is proportional to the applied voltage, reducing the voltage by half results in reducing starting toque to 25% of the normal voltage. Autotransformers connected in either star or delta configuration allows reduction of line voltage by up to half. In this start approach, the current drawn is always less than motor current determined by transformation ratio. When the motor reaches appropriate speed (approximately 80% of rated speed), the circuit is disconnected switched to ‘run’ position automatically. Lastly, a star-delta configuration is designed in a manner that starting in star configured then switched to delta while running at normal speed. Connecting the stator in delta configuration during starting allows the voltage to be reduced in a factor pf 0.577 (1/√3) to delta connection.
Synchronous motor, on the other hand, are not self-starting devices but started by either using external prime mover or damper windings. Prime mover such as external motor (induction motor or shunt) is used to rotate the rotor to near or synchronous speed then coupled magnetically with stator by connecting 3-phase line voltage. After connecting, external motor is decoupled. Whereas, by connecting damper windings makes the synchronous motor self-start but in itself is not. The field windings are first de-energised by short-circuiting through a resistor before connecting to three-phase supply. The connected stator produce magnetic field links to the damper making it to starts like an induction motor then coupling to the rotor running a synchronous speed.
d. Selection of a motor for a specific industrial application
Fundamentally, motor selection are based on specific requirements and application one desires. The choose id based on the following steps.
1. Load characteristics required. One looks at the motor torque categorised as constant torque, changing torque with time, and abrupt changing torque. The load (horsepower required) aids in sizing motor. Such devices as conveyors, compressors, positive displacements pumps, punch presses, saws, batch conveyors, and extruders fall in this category where their load demands can rise from low to high.
2. Type of current supplied to the stator whether dc or ac supply.
3. Operating speed of application whether variable and constant informing ambient operating conditions of the selected motor. For instance, DC motors have high installed base at a zero speed compared to the AC motors
4. Control requirement in application, in the areas where precise positioning is required can use stepper or servomotor. For example, for a high-performance application, a motor with high accuracy, precision, and high speed is require. In such situation, a servo system is suitable for high torque because of high speed and better high-dynamic load than stepper motor.
e. Efficiency of a number of available motors and make recommendation for a specified operational requirement
Motor efficiency is ratio of the electrical power input to mechanical power output. It is affected by such losses as friction losses, windage losses, iron losses, copper losses, and stray losses. In induction motor, maximum efficiency is achieved when slip is near zero, that is, rotor rotates near magnetic field rotation. However, for a higher torque (higher loads), higher slip is preferable affecting motor efficiency. Induction motor has efficiency in the range of 85-87% whereas, synchronous motors have a higher efficiency because it runs at synchronous speed not depended on the load and lack of self-start aid in making its efficiency higher compared to induction motor. Its higher efficiency makes it applicable in power stations, voltage controller, and manufacturing industries. Induction motor, though less efficient, is applicable in fans, blowers, and compressors because of its relative speed.
Task 3: Types of Generators
a. Types and constructions of generators
There are two main type of generators, AC and DC generators. DC generators can be classified into two types based on excitation process: Self-exciting generators and Separately excited generators.
1. Separately-excited generators: energisation of the field magnets is done using an independent DC source.
2. Self-excited energised by the current produced by the generator itself. The initial emf generated comes from the field poles magnetism. There are three type of generators in this category based on windings: Series wound (field and armature windings are in series), shunt wound (armature and field windings are in parallel), and compound wound (has combined shunt and series windings)
AC generators works with principle of faradays electromagnetic induction. Its construction follows a DC generators types consisting of a yoke, permanent magnets, coils. Pole core, armature core, slips, brushes, and pole shoe. Magnets produce a magnetic field while the pole shoe houses the windings. Armature flux is produced by armature windings while slip aid in enhancing smooth performance of the generator. There are two types: synchronous and induction generators.
b. Identify a generator for a specific application (based on characteristics)
1. Turbo (cylindrical-rotor): Used mainly in the major power plants. As such, the rotor is made using a solid steel for strength. The stator houses windings located in slots that are reinforced for mechanical strength
2. Salient-pole generators: This type of generators is usually small and medium sized. The poles are usually laminated to in order to reduce eddy currents losses. The salient and turbo generators difference is in rotor construction where in salient, the rotor carry excitation winding distributed within it poles.
c. Frequency of the induced emf and flux per pole
Alternator 3-phase; 16pole; Y connected salient pole; 144 slots; 10 conductor/pole; speed- 375rpm; terminal voltage 2.657kV
Frequency of the induced emf
F= Np120
=16*375120
= 50Hz
Flux per pole
Slots per pole/phase =14416*3 =3
Slot angle/β= 180°3*3 =20°
Distribution factor kd =/2 msin /2
=20/2 3sin 20/2
=0.9597
Turns/∅ (Tph) = 144*106 =240
Flux/phase =Eph4.44*kp*kd*f*Tph
=15344.44*1*0.9597*50*240
=0.03wb
d. Justification of application of a specific type of generator
Salient pole generator
A salient pole generator is part of the synchronous type generator. A salient pole generator has its poles projecting outwards. Its constructions where the poles are physically separate carry concentrated excitation winding. Its large diameter and small axial lengths in addition to high number of poles makes it applicable in lower speed (100-1500 rpm) setting.
e. Efficiency of available generators and recommendation for a specified operation
Separately-excited DC generators:
Self-exciting DC generators:
Salient pole AC generators:
Cylindrical AC generators:
Task 4:
a. Parts and operations of a magnetic actuator and traducers
Actuators: Are electrical devices that converts electrical energy into mechanical motion (energy) or signal. They can be either linear or rotary. Unlike linear rotary actuators, rotary actuators are not limited to the directional direction but can keep rotating without limit. Magnetic actuators consist of armature (plunger), magnetic core, turn coils, and guider. The Lorentz Force equation outlining that a force is produce by a current-carrying conductor placed in static magnetic field hold operating principles of magnetic actuators. Fundamentally, the physical displacement is caused by force due to cutting magnetic field.
Transducers, on the other hand, converts one form of energy to another such as physical qualities like as pressure, sound, and temperature into electrical signal (voltage, frequency, or current). Transducers consist to main parts; sensing and transducing elements. Other parts include signal processing, power supply, referencing source, and amplifiers. The operating principle of magnetic transducers is detection of change and disturbance in magnetic field components such as direction, strength, or flux. These components (angles, presence, rotation, and induced electrical current) can be detected through monitoring.
b. Types of transducers (passive, active, and sensors)
Active transducers: This type of transducers generate electrical signal in response to external environmental stimulation. For example, piezoelectric and thermocouples transducers are sensors converting mechanical energy into electrical energy.
Passive transducers: These type transducers require an external energy source to convert physical quantities such as capacitance, inductance, and resistance through stimulation into electrical signal. It works by taking external power that changes the physical properties of a transducer. Whereas, a sensor measures a physical quantity converting into readable data or signal. For instance, motion sensor detects motion (physical environment) then converts into electrical signal.
c. Different types of actuators (solenoid, linear, and rotary)
Linear actuator: In this type of actuators, motion created moves in a straight line. Its working principle is turning rotational motion (electrical/magnetic energy) into linear motion through adapting only a linear movement.
Solenoid actuator: it is an electromagnetic actuator converting electrical energy (voltage and current) into mechanical energy (motion) through production of magnetic field. An external electrical energy supply is connected to coil. Magnetic field causes an armature resting in a spring moves vertically inside a coil resulting in mechanical motion.
Rotary actuators: unlike linear and solenoid actuators that produce linear motion, the change in energy in rotary actuators results in rotation motion. Electrical actuators include stepper motors and servomotors producing a fixed angular motion.
d. Reluctances Rc and Rg
Reluctances Rc
Rc =LcroAc
=0.5700045*10-7*10*10-4
=5.684*103A.Turns/Wb
Reluctances Rg
Rg= goAg
=5*10-44π10-7*10*10-4
=3.978*105A.Turns/Wb
Flux
∅=BCAC But BC =1.0T
= 1.0*10*10-4
=10*10-4Wb
Current i
I= FN
=∅(Rc+Rg)N
=10*10-44.0357*105600
=0.67A
e. Selection of suitable transducers for industrial applications
Selecting transducers should be guided by the following factors:
Operating principles such as inductive, ionization, resistivity, or piezoelectric

Sensitivity: the selected transducers must be sensitive enough in order to give the intended and detectable output
Accuracy: The chosen transducer should be considerably accurate to the captured environmental variables and should avoid error
Environment compatibility: The taken transducer should perform optimally maintaining input-output relationship in the given environment without breaking down such that withstanding shock, pressure, humidity, noise, and temperature while in use.
Stability and reliability: selected transducer should be of high stability not just in operation but also in storage. Reliability embodies a case where transducers fail, the components should continue to function uninterrupted.
Operating range: in selecting a transducer, a good resolution over a range of operation should be taken into consideration. For instance, taking measurement of temperature of a boiler that can rise to over 20000C, one cannot take a temperature sensitive transducer in the range of 10-1000C.
f. Analyse practical application of transducers and actuators in an industrial situation
Piezoelectric transducers: These types of transducers convert mechanical energy into electrical energy and vice versa. Commonly, they are used in healthcare sector to detect muscle movements, acceleromyography. In transport industry, by injecting to the fuel injection system, it is used to determine engine load by measuring manifold absolute pressure. As such, can be used as engine knock sensors in engine management system. In application, coefficient should be high in order to maintain higher energy conversion efficiency.
Temperature transducers: These are transducers that convert temperature of a system to other energy forms such as mechanical (pressure) or electrical energy. Practical application include temperature control in such control systems as ventilation, fans, air-conditioning, and heating. In this case, precision and accuracy can be obtained through use of instrumentation and calibrated sensors.
Pressure Transducer: Also referred as a pressure sensors, indicators, or manometers, it converts pressure imposed into electrical signals. It is used in numerous application such as altitude sensing (airplanes), leak testing (pipelines), depth sensing (submarines), and flow sensing. Due to numerous available pressure sensors, selecting the correct one to in accordance to the requirements and application is core in operation efficiency



- 24/7 Customer Support
- 100% Customer Satisfaction
- No Privacy Violation
- Quick Services
- Subject Experts